JetsonNano에서 ROS2를 사용하기 위해선 Xbuntu20.04를 사용해야 한다. 하지만 이것을 사용 시 젯슨나노의 버전에 따른 dtb 수정이 필요하고 이 과정이 복잡하다. 아래 그림과 같이 JetsonNano는 두 가지 버전(A02, B01)이 있다. 최근 JetsonNano를 구매하면 B01 버전이 오고, 카메라 커넥터가 두개다.

참고
- https://www.youtube.com/watch?v=6WZOlkS4D7c&t=63s
- Xbuntu(주분투): 우분투를 기반으로 Xfce 데스크톱 환경이 적용된 리눅스 배포판
- 젯슨나노는 일반적인 Ubuntu가 아닌, L4T(Linux for Tegra)가 들어가 있어야 한다.
- JetsonNano의 버전에 따라 dtb(Device Tree Blob)을 달리 설치해야 한다.
- dtb는 리눅스 부팅방법이다.
- 통합 이미지를 굽고, 이미지와 젯슨 버전에 맞는 dtb를 설치하면 된다.
- 통합이미지는 JetsonNano A02 용이다.
Omorobot 이미지를 사용할 때는 아래와 같은 방법으로 시도해 본다
- 오모로봇 제공 이미지를 sd카드에 굽고 부팅해본다
- 부팅이 되면 패스
- 부팅 에러가 나면 dtb를 수정
부팅 에러가 나는 경우, 아래 과정을 실시한다. 부팅이 되면 패스~!
dtb 수정!
- 수정 방법: Windows10인 경우 아래 링크 프로그램을 설치 후 재부팅
- https://drive.google.com/file/d/14q-ImvpBAQ1UNNARp6qvi-iOzdl-GxrU/view?usp=sharing
- Product activation에서 'Start 10-day Trial'을 선택해서 10일간 무료로 사용하자
- Linux File Systems for Windows by Paragon Software을 연다
- 방법은 11번째 줄, APPEND 아래 FDT /boot/~.dtb를 입력 후 저장
- 만약 부팅이 됐다면, >> cat /sys/firmware/devicetree/base/compatible 명령어를 이용하여 사용 중인 시스템에 적합한 dtb를 찾을 수 있다.
- 그런데 이미 부팅됐으면...? 난 A02버전 젯슨을 사용하므로 아래 그림과 같이 'a02'가 뜬다.
- B01 버전의 젯슨인 경우는 아래와 같이 뜬다
- 만약 JetsonNano B01을 사용한다면 아래 두 개 중 한 개로 지정해야 한다
- FDT /boot/tegra210-p3448-0000-p3449-0000-b00.dtb
- FDT /boot/tegra210-p3448-0002-p3449-0000-b00.dtb
- 방법은 11번째 줄, APPEND 아래 FDT /boot/~.dtb를 입력 후 저장
>> cd /boot
>> ls를 하면 dtb 선택정보들이 나온다
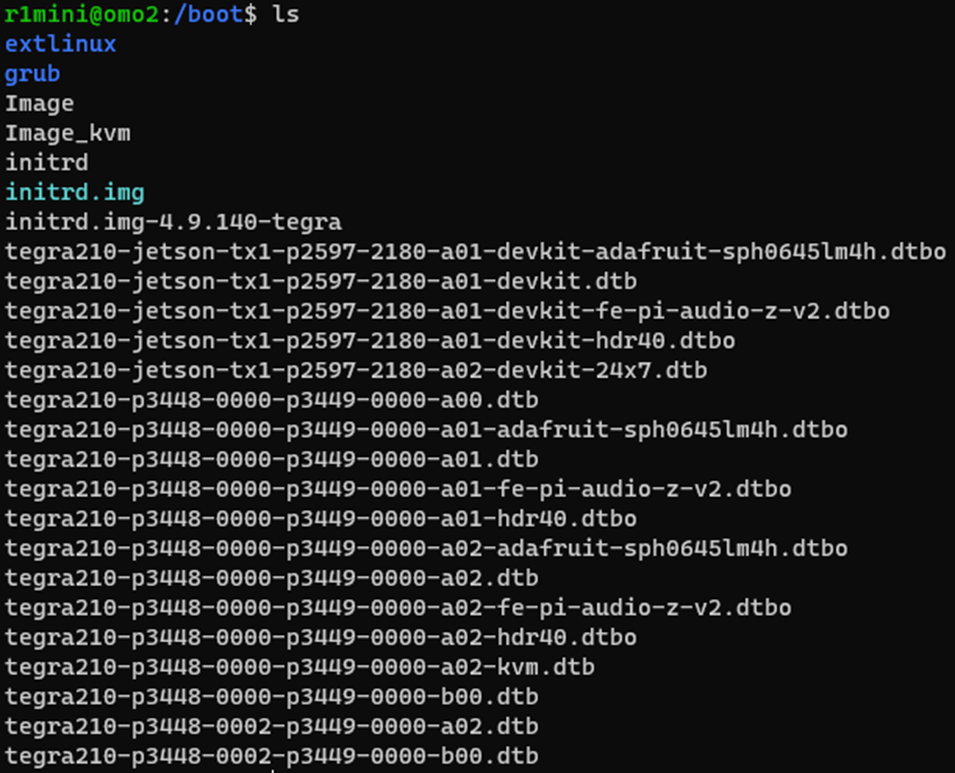
이들 중 해당하는 dtb를
>> suo vi /boot/extlinux/extlinux.conf 를 연 후 'APPEND' 오른쪽에 해당 dtb를 붙여 넣는다
JetsonNano에서 Xubuntu20.04 OS 부팅 성공하셨나요?? 성공하셨다면 다행입니다. 히유.
'AI로봇 > ROS2+SLAM' 카테고리의 다른 글
| AI로봇랩 2강) ROS2 on Ubuntu20.04 at JetsonNan (1) | 2022.03.10 |
|---|---|
| AI로봇랩 4강) Cartographer SLAM with ROS2 on Omorobot (0) | 2022.03.10 |
| AI로봇랩 3강) ROS2로 원격 로봇 제어하기 (1) | 2022.03.08 |
| AI로봇랩 1강) Windows WSL2에 ROS2 설치하기 (11) | 2022.02.18 |



