-
 ROS2+SLAM
AI로봇랩 4강) Cartographer SLAM with ROS2 on Omorobot
Frenz AI로봇랩에서 진행한 AI로봇랩 2기 4강 내용입니다. 3강: https://keep-steady.tistory.com/46 내용 - Lidar SLAM at JetsonNano with ROS2 (ROS2를 이용하여 JetsonNano에서 라이다 SLAM) 참고 블로그: https://omorobot.com/docs/slam-%ed%95%98%ea%b8%b0-mapping/ 참고 영상: https://www.youtube.com/watch?v=fYa7R2koXPs&t=13shttps://omorobot.com/docs/ros2-teleop-%eb%aa%85%eb%a0%b9%ec%9c%bc%eb%a1%9c-%ec%a1%b0%ec%a2%85%ed%95%98%ea%b8%b0/ 1) SLAM map..
ROS2+SLAM
AI로봇랩 4강) Cartographer SLAM with ROS2 on Omorobot
Frenz AI로봇랩에서 진행한 AI로봇랩 2기 4강 내용입니다. 3강: https://keep-steady.tistory.com/46 내용 - Lidar SLAM at JetsonNano with ROS2 (ROS2를 이용하여 JetsonNano에서 라이다 SLAM) 참고 블로그: https://omorobot.com/docs/slam-%ed%95%98%ea%b8%b0-mapping/ 참고 영상: https://www.youtube.com/watch?v=fYa7R2koXPs&t=13shttps://omorobot.com/docs/ros2-teleop-%eb%aa%85%eb%a0%b9%ec%9c%bc%eb%a1%9c-%ec%a1%b0%ec%a2%85%ed%95%98%ea%b8%b0/ 1) SLAM map..
-
 ROS2+SLAM
AI로봇랩 1강) Windows WSL2에 ROS2 설치하기
Frenz AI로봇랩에서 ROS2 강의영상 입니다. ROS의 이론과 설치 (Windows WSL2)에 대해 다룹니다. https://youtu.be/AUSOnvOTt2s ROS2는 윈도우에서도 가능하다! ROS2를 윈도우에 설치하기 위한 3가지 방법 그냥 Window Window+wsl2 (!!) Window+Docker Window의 wsl2를 이용해서 ROS2를 설치해보자 윈도우에서 리눅스를 사용할 수 있게 해주는 WSL2 버전이 정식으로 출시 WSL은 Windows Subsystem for Linux 2의 줄임말 윈도우의 가상화 기능을 활용해서 윈도우 위에서 리눅스를 사용 가능 단순히 가상머신으로 리눅스를 사용할 수 있는 것이 아님 윈도우 시스템과 통합되어 마치 하나의 머신처럼 자연스럽게 리눅스를 ..
ROS2+SLAM
AI로봇랩 1강) Windows WSL2에 ROS2 설치하기
Frenz AI로봇랩에서 ROS2 강의영상 입니다. ROS의 이론과 설치 (Windows WSL2)에 대해 다룹니다. https://youtu.be/AUSOnvOTt2s ROS2는 윈도우에서도 가능하다! ROS2를 윈도우에 설치하기 위한 3가지 방법 그냥 Window Window+wsl2 (!!) Window+Docker Window의 wsl2를 이용해서 ROS2를 설치해보자 윈도우에서 리눅스를 사용할 수 있게 해주는 WSL2 버전이 정식으로 출시 WSL은 Windows Subsystem for Linux 2의 줄임말 윈도우의 가상화 기능을 활용해서 윈도우 위에서 리눅스를 사용 가능 단순히 가상머신으로 리눅스를 사용할 수 있는 것이 아님 윈도우 시스템과 통합되어 마치 하나의 머신처럼 자연스럽게 리눅스를 ..
-
 영상인식(Vision)
(이미지 분류 고급) 2_EfficientNet을 이용한 대선후보 분류 Hands-On
AI에서 이미지 공부할 때 MNIST만 돌려보는 건 지겹지 않은가?? 이미지 분류 고급과정에선 아래와 같이 이미지 분류의 A to Z를 Hands-on 과정으로 다룬다. 1. 이미지 자동 크롤링 2. EfficientNet을 이용한 이미지 분류 3. GradCAM을 이용한 XAI(Explainable AI) 4. 적대적 공격(Adversarial attack)으로 내 모델 공격하기 2022 대선후보 데이터셋 구축: 이전글 참고 https://keep-steady.tistory.com/29 그중 두 번째, EfficientNet을 이요한 이미지 분류 - 목적: 최신 이미지 분류 모델 학습 - 순서 1) 데이터 준비 - dataset - dataloader 2) EfficientNet 모델 준비 3) 학습 ..
영상인식(Vision)
(이미지 분류 고급) 2_EfficientNet을 이용한 대선후보 분류 Hands-On
AI에서 이미지 공부할 때 MNIST만 돌려보는 건 지겹지 않은가?? 이미지 분류 고급과정에선 아래와 같이 이미지 분류의 A to Z를 Hands-on 과정으로 다룬다. 1. 이미지 자동 크롤링 2. EfficientNet을 이용한 이미지 분류 3. GradCAM을 이용한 XAI(Explainable AI) 4. 적대적 공격(Adversarial attack)으로 내 모델 공격하기 2022 대선후보 데이터셋 구축: 이전글 참고 https://keep-steady.tistory.com/29 그중 두 번째, EfficientNet을 이요한 이미지 분류 - 목적: 최신 이미지 분류 모델 학습 - 순서 1) 데이터 준비 - dataset - dataloader 2) EfficientNet 모델 준비 3) 학습 ..
-
 자연어처리(NLP)
GPT3 1편) GPT3 이론 파헤치기
최근 인공지능 기반 자연어처리는 거대 언어모델 개발로 큰 성공을 거두고 있습니다. 오늘은 GPT3에 대해 알아봅시다. 1. 언어모델(Language Model) 언어모델은 크게 Auto encoding 모델과 Auto regressive 모델 두 종류로 나눌 수 있습니다. 1.1. Auto-Encoding Auto-Encoding 모델은 임의로 문장에서 빈칸([MASK])을 만든 후 주변 단어를 통해 문맥상 빈칸을 맞추는 방식입니다.을 위한 BERT, Electra, RoBerta가 이 방식에 속합니다. 동일 문장이라도 random masking 위치에 따라 서로 다른 정보 학습할 수 있고, Downstream task에 Fine-tuning 시 [MASK] 토큰이 등장하지 않으므로 Pre-trainin..
자연어처리(NLP)
GPT3 1편) GPT3 이론 파헤치기
최근 인공지능 기반 자연어처리는 거대 언어모델 개발로 큰 성공을 거두고 있습니다. 오늘은 GPT3에 대해 알아봅시다. 1. 언어모델(Language Model) 언어모델은 크게 Auto encoding 모델과 Auto regressive 모델 두 종류로 나눌 수 있습니다. 1.1. Auto-Encoding Auto-Encoding 모델은 임의로 문장에서 빈칸([MASK])을 만든 후 주변 단어를 통해 문맥상 빈칸을 맞추는 방식입니다.을 위한 BERT, Electra, RoBerta가 이 방식에 속합니다. 동일 문장이라도 random masking 위치에 따라 서로 다른 정보 학습할 수 있고, Downstream task에 Fine-tuning 시 [MASK] 토큰이 등장하지 않으므로 Pre-trainin..
-
 ROS2+SLAM
AI로봇랩 5강) Xubuntu 부팅에러 시 dtb 수정방법 at JetsonNano
JetsonNano에서 ROS2를 사용하기 위해선 Xbuntu20.04를 사용해야 한다. 하지만 이것을 사용 시 젯슨나노의 버전에 따른 dtb 수정이 필요하고 이 과정이 복잡하다. 아래 그림과 같이 JetsonNano는 두 가지 버전(A02, B01)이 있다. 최근 JetsonNano를 구매하면 B01 버전이 오고, 카메라 커넥터가 두개다. 참고 https://www.youtube.com/watch?v=6WZOlkS4D7c&t=63s Xbuntu(주분투): 우분투를 기반으로 Xfce 데스크톱 환경이 적용된 리눅스 배포판 젯슨나노는 일반적인 Ubuntu가 아닌, L4T(Linux for Tegra)가 들어가 있어야 한다. JetsonNano의 버전에 따라 dtb(Device Tree Blob)을 달리 설치..
ROS2+SLAM
AI로봇랩 5강) Xubuntu 부팅에러 시 dtb 수정방법 at JetsonNano
JetsonNano에서 ROS2를 사용하기 위해선 Xbuntu20.04를 사용해야 한다. 하지만 이것을 사용 시 젯슨나노의 버전에 따른 dtb 수정이 필요하고 이 과정이 복잡하다. 아래 그림과 같이 JetsonNano는 두 가지 버전(A02, B01)이 있다. 최근 JetsonNano를 구매하면 B01 버전이 오고, 카메라 커넥터가 두개다. 참고 https://www.youtube.com/watch?v=6WZOlkS4D7c&t=63s Xbuntu(주분투): 우분투를 기반으로 Xfce 데스크톱 환경이 적용된 리눅스 배포판 젯슨나노는 일반적인 Ubuntu가 아닌, L4T(Linux for Tegra)가 들어가 있어야 한다. JetsonNano의 버전에 따라 dtb(Device Tree Blob)을 달리 설치..
-
 자연어처리(NLP)
TransCoder, 비지도학습 기반 프로그래밍 언어 번역기
TransCoder(Unsupervised Translation of Programming Languages) Link : https://arxiv.org/pdf/2006.03511.pdf github: https://github.com/facebookresearch/TransCoder 참고 : https://www.facebook.com/monthly.nlp/posts/258096098955595/ 5월 Facebook AI Research에서 Transcoder Transcoder라는 별칭의 코드 번역기가를 공개했다. 비지도 학습 기반 번역 기법을 프로그래밍 언어 간 변환에 적용한 연구이다. 아래 그림은 TransCoder 예시이다. 본 글에서는 Transcoder에 대해 다룬다. Abstract 1..
자연어처리(NLP)
TransCoder, 비지도학습 기반 프로그래밍 언어 번역기
TransCoder(Unsupervised Translation of Programming Languages) Link : https://arxiv.org/pdf/2006.03511.pdf github: https://github.com/facebookresearch/TransCoder 참고 : https://www.facebook.com/monthly.nlp/posts/258096098955595/ 5월 Facebook AI Research에서 Transcoder Transcoder라는 별칭의 코드 번역기가를 공개했다. 비지도 학습 기반 번역 기법을 프로그래밍 언어 간 변환에 적용한 연구이다. 아래 그림은 TransCoder 예시이다. 본 글에서는 Transcoder에 대해 다룬다. Abstract 1..
-
 Pytorch
Pytorch visualization #2. TensorboardX 사용법
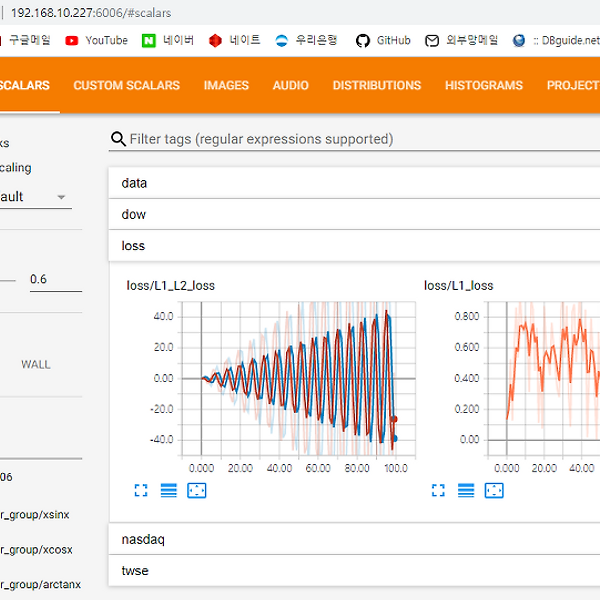
파이토치를 이용하다가 실시간 visualization을 하기 위해여 visdom을 사용하였다.하지만......쓰다쓰다 도저히 엉성하고 어설퍼서 tensorboard를 사용하기로 했다. 그리고 내린 결론은 역시!!!! Tensorboard를 써야겠다!! 는 것이다.사실 실시간으로 visualize 해야될 필요는 크게 없다. 어차피 그래프 plot 시키게 짜놨으니까.근데 왜 쓸데없이 계속 이작업을 하고있는지 모르겠다.본 글에서는 TensorboardX의 설치와 수행방법, 그리고 변수, 이미지, text, pr_curve, json export 등을 다룬다. Pytorch TensorboardX Tutorial- 본 블로그 실습코드 : https://github.com/keep-steady/etc_code/b..
Pytorch
Pytorch visualization #2. TensorboardX 사용법
파이토치를 이용하다가 실시간 visualization을 하기 위해여 visdom을 사용하였다.하지만......쓰다쓰다 도저히 엉성하고 어설퍼서 tensorboard를 사용하기로 했다. 그리고 내린 결론은 역시!!!! Tensorboard를 써야겠다!! 는 것이다.사실 실시간으로 visualize 해야될 필요는 크게 없다. 어차피 그래프 plot 시키게 짜놨으니까.근데 왜 쓸데없이 계속 이작업을 하고있는지 모르겠다.본 글에서는 TensorboardX의 설치와 수행방법, 그리고 변수, 이미지, text, pr_curve, json export 등을 다룬다. Pytorch TensorboardX Tutorial- 본 블로그 실습코드 : https://github.com/keep-steady/etc_code/b..
 음성인식
바이든? 날리면? 주파수 기반 음성처리 노이즈 제거
음성인식
바이든? 날리면? 주파수 기반 음성처리 노이즈 제거
 자연어처리(NLP)
LLM 실습 1) dolly with langchain
자연어처리(NLP)
LLM 실습 1) dolly with langchain
 자연어처리(NLP)
GPT3 3편) HyperCLOVA(한국어 GPT3), CLOVA Studio 사용후기
자연어처리(NLP)
GPT3 3편) HyperCLOVA(한국어 GPT3), CLOVA Studio 사용후기
 자연어처리(NLP)
GPT3 2편) OpenAI API로 chatbot을 만들어보자!
자연어처리(NLP)
GPT3 2편) OpenAI API로 chatbot을 만들어보자!
 자연어처리(NLP)
GPT3 1편) GPT3 이론 파헤치기
자연어처리(NLP)
GPT3 1편) GPT3 이론 파헤치기
 영상인식(Vision)
(이미지 분류 고급) 1_대선후보 이미지 자동 크롤링! 무한개까지
영상인식(Vision)
(이미지 분류 고급) 1_대선후보 이미지 자동 크롤링! 무한개까지
 데이터 분석
5분만에 끝장내는 AutoML(h20) 사용법
데이터 분석
5분만에 끝장내는 AutoML(h20) 사용법
 자연어처리(NLP)
XLM, 다언어 임베딩 및 비지도학습 기반 번역
자연어처리(NLP)
XLM, 다언어 임베딩 및 비지도학습 기반 번역














